DTC Navigation Solutions
Ihr Komplett-Lösungspartner rund um Messtechnik für autonomes Fahren und ADAS-Testing

Inertiale Navigationssysteme
Weiterlesen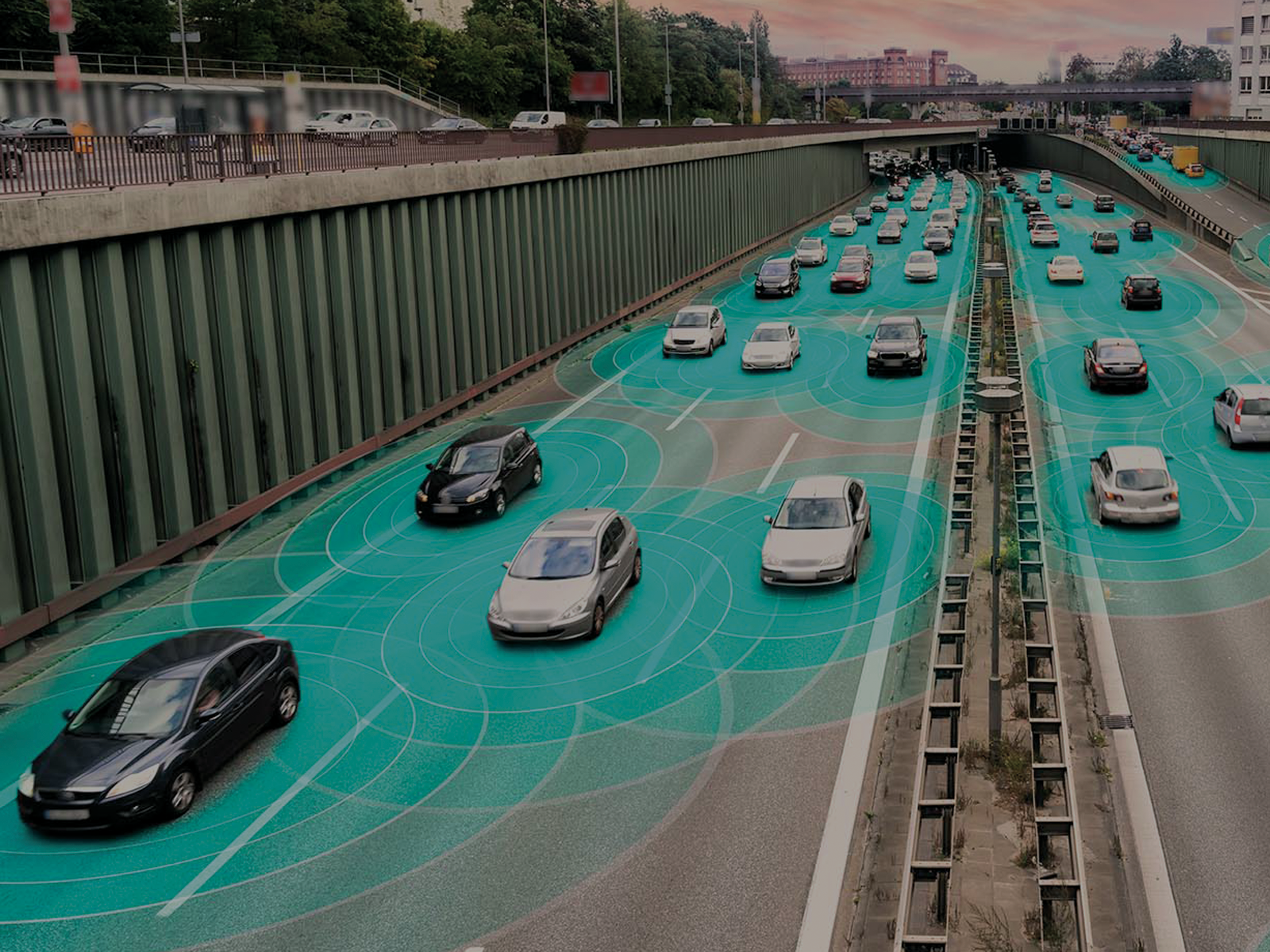
LiDAR Systeme HESAI
Weiterlesen
AVAD 3
Weiterlesen
RTK Dienste
Weiterlesen
Zubehör
Weiterlesen
Quick Tipps
Weiterlesen
Messtechnik in Bewegung
Weiterlesen
Lorem ipsum dolor sit amet, consetetur sadipscing elitr, sed diam nonumy eirmod tempor invidunt ut labore et dolore magna aliquyam erat, sed diam voluptua. At vero eos et accusam et justo duo dolores et ea rebum. Stet clita kasd gubergren, no sea takimata sanctus est Lorem ipsum dolor sit ametdolor sit amet, consetetur sadipscing elitrdolor sit amet, consetetur
Lorem ipsum dolor sit amet, consetetur sadipscing elitr, sed diam nonumy eirmod tempor invidunt ut labore et dolore magna aliquyam erat, sed diam voluptua. At vero eos et accusam et justo duo dolores et ea rebum. Stet clita kasd gubergren, no sea takimata sanctus est Lorem ipsum dolor sit amet.
Lorem ipsum dolor sit amet, consetetur sadipscing elitr, sed diam nonumy eirmod tempor invidunt ut labore et dolore magna aliquyam erat, sed diam voluptua. At vero eos et accusam et justo duo dolores et ea rebum. Stet clita kasd gubergren, no sea takimata sanctus est Lorem ipsum dolor sit amet. Lorem ipsum dolor sit amet, consetetur sadipscing elitr, sed diam nonumy eirmod tempor invidunt ut labore et dolore magna aliquyam erat, sed diam voluptua. At vero eos et accusam et justo duo dolores et ea rebum. Stet clita kasd gubergren, no sea takimata sanctus est Lorem ipsum dolor sit amet.
Automotive
Lorem ipsum dolor sit amet, consetetur sadipscing elitr, sed diam nonumy eirmod tempor invidunt ut labore et dolore magna aliquyam erat, sed diam voluptua. At vero eos et accusam et justo duo dolores et ea rebum. Stet clita kasd gubergren, no sea takimata sanctus est Lorem ipsum dolor sit amet. Lorem ipsum dolor sit amet, consetetur sadipscing elitr, sed diam nonumy eirmod tempor invidunt ut labore et dolore magna aliquyam erat, sed diam voluptua. At vero eos et accusam et justo duo dolores et ea rebum. Stet clita kasd gubergren, no sea takimata sanctus est Lorem ipsum dolor sit amet.
Survey und Mapping
Lorem ipsum dolor sit amet, consetetur sadipscing elitr, sed diam nonumy eirmod tempor invidunt ut labore et dolore magna aliquyam erat, sed diam voluptua. At vero eos et accusam et justo duo dolores et ea rebum. Stet clita kasd gubergren, no sea takimata sanctus est Lorem ipsum dolor sit amet. Lorem ipsum dolor sit amet, consetetur sadipscing elitr, sed diam nonumy eirmod tempor invidunt ut labore et dolore magna aliquyam erat, sed diam voluptua. At vero eos et accusam et justo duo dolores et ea rebum. Stet clita kasd gubergren, no sea takimata sanctus est Lorem ipsum dolor sit amet.
Ihre Ansprechpartner

Stefan Lohmüller
Head of Technical Sales
+49 89 1250309-35 sales@dtc-solutions.de Termin vereinbaren
Christoph Niewöhner
Head of Application & Support
+49 89 1250309-99 support@dtc-solutions.de Termin vereinbarenAccordion
Inertiale Navigationssysteme gibt es in allen Formen und Größen. Eines haben sie jedoch gemeinsam: Sie bestehen aus jeweils Kreiseln und Beschleunigungssensoren und einer zentralen Verarbeitungseinheit, welche die von diesen Sensoren kommenden Messungen verrechnet. Diese Inertialsensoren werden als Inertial Measurement Unit (IMU) bezeichnet. Da das ganze System einen eigenen Bezugspunkt festlegt, heißt es auch Inertial Reference System (IRS).
Das Grundprinzip eines INS besteht in der Erfassung der Beschleunigungen und der Drehraten als Ausgangspunkt mittels Inertialsensoren. Ist die Beschleunigung eines Massepunkts im Raum bekannt, erhält man durch Integration über die Zeit die Geschwindigkeit und nach nochmaliger Integration die Positionsänderung. Die Winkelgeschwindigkeit wiederum wird mit einem Drehratensensor gemessen. Der Verkippungswinkel ergibt sich aus der Integration der gemessenen Winkelgeschwindigkeiten über die Zeit in den drei Raumrichtungen. Insgesamt erfordert ein INS die Messung von 6 Größen: die Beschleunigung und die Winkelgeschwindigkeit, jeweils in drei Raumrichtungen.
INS, insbesondere jene Systeme welche auf MEMS basieren, liefern nur für kurze Messperioden verlässliche Werte. Bei erdgebundener Navigation macht man sich deshalb den Einfluss der gekrümmten Erdoberfläche zunutze, um das Anwachsen des Positionsfehlers auf eine lineare Zunahme über der Zeit zu beschränken. Dazu werden Trägheitsnavigationssysteme häufig mit anderen Verfahren kombiniert, beispielsweise Odometrie oder Satellitennavigation, um eine höhere Positionsgenauigkeit über lange Zeiträume zu erreichen.
Mögliche Einsatzgebiete sind:
- Führung autonomer Roboter und fahrerloser Fahrzeuge Kfz-Dynamik-Vermessung
- Schwimmwinkelmessung
- Elchtests Stabilisierungen von Plattformen
- Kameras
- Flugobjekten Vermessungstechnik
Durch die enge Zusammenarbeit mit Herstellern autonomer Fahrzeuge, wissen wir, dass sowohl Lidarsensoren als auch Kameras eine wichtige Rolle in einem autonomen Testszenario spielen. Während Kameras eine hohe Auflösung bieten, liefern Lidar-Sensoren mehr Tiefeninformationen. In Situationen, in denen einer der beiden Sensoren möglicherweise eine Leistungsminderung aufweist, z.B. bei Regen, kann der andere Sensor eine Rolle bei der Erfassung des Durchhangs für ein Wahrnehmungssystem spielen. Bei Regen in San Francisco haben wir den digitalen Lidar Sensor OS1 von Ouster getestet - mit hervorragendem Ergebnis!