AV200
Zuverlässige Leistung - Kompaktes Gehäuse
Kompaktes, GNSS-gestütztes inertiales Navigationssystem für die präzise Positionsbestimmung
0.1° | 0.02 m |
0.015 m | 0.2° Heading |

AV200: Zuverlässige Leistung - Kompaktes Gehäuse
- Das AV200 ist ein inertiales Navigationssystem, in dem zwei GNSS-RTK-Empfänger mit einer kompakten, MEMS-basierten inertialen Messeinheit (IMU) kombiniert wurden, um in Echtzeit Positions- und Bewegungsdaten mit Genauigkeit im Zentimeterbereich bereitzustellen.
- Die IMU-Technologie von OxTS überzeugt durch seine Leistungsfähigkeit und bietet die Präzision und Zuverlässigkeit, die für anspruchsvolle autonome- und ähnliche Anwendungen erforderlich sind, und das alles bei einem Bruchteil der Größe und des Stromverbrauchs.
Navigation, auf die Sie sich verlassen können
- Ein Zweifrequenz-Empfänger mit Unterstützung für mehrere Satellitenkonstellationen sorgt dafür, dass weltweit und jederzeit alle erreichbaren Satelliten genutzt werden, während gx/ix™ mit enger Kopplung Fehler auch unter den schwierigsten Bedingungen minimiert.
- Die integrierte Navigationsengine nutzt den branchenweit renommierten Kalman-Filter von OxTS, um die Trägheitsdaten und Informationen aus anderen verfügbaren Quellen zu einer ununterbrochenen Ausgabe zu verrechnen.
Nahtlose Integration
- Das AV200 lässt sich per Ethernet- und CAN-Datenschnittstellen sowie Digital PPS für die Zeitsynchronisierung und PTP-Support schnell und problemlos in größere, komplexe Systeme einbauen.
- Es verfügt über einen ROS2-Treiber für die Datenentschlüsselung.
- Mithilfe der Generic-Aiding-Schnittstelle von OxTS können externe Sensoren integrieren werden, ohne dass eigene Schnittstellen und Kodierer benötigt werden
Anwendungsbereiche
- Drohnen und andere unbemannte Flugkörper
- Autonome Fahrzeuge im Bergbau
- Industrielle Automatisierung
- Hafen- und Logistikroboter
- Robo-Taxis, Shuttles und Busse
Wesentliche Merkmale
- Kombination von GNSS + IMU für die präzise Positionsgenauigkeit in autonomen Anwendungen
- Zuverlässige Leistung mit dem branchenweit bewährtem Kalman-Filter und Navigationsmodul
- Die Temperaturkalibrierung sorgt für zuverlässige Leistung in einem breiten Temperaturspektrum
- Zuverlässige Positionsbestimmung auf Fahrspurebene
- Vierfach-Konstellation für maximale GNSS-Satellitenabdeckung weltweit
- Kontinuierliche Echtzeit-Datenausgabe, auch bei GNSS-Ausfällen.
- Duale Antennen verbessern die Richtungsmessung im Stehen und bei langsamen Bewegungen
- Unterstützung von ROS2-Treibern
- Keine ITAR-Pflicht
- Gutes Preis- Leistungsverhätlnis
Spezifikationen
| LEISTUNG | ||||||
| Position | Positionsgenauigkeit (CEP)1 2 | Max. Abweichung Geschwindigkeit (RMS) |
Roll/Pitch | Richtungsgenauigkeit (1σ) 1 2 | Max. Aktualisierungs- rate |
Duale Antenne |
GPS L1, L2; GLONASS L1, L2 BeiDou B1, B2; Galileo E1, E5b | SPS: 1,5 m; DGPS: 0,4 m RTK: 0,05 m |
0,2 km/h RMS | 0.1° | 0.2° | 250 Hz | Ja |
| HARDWARE | ||||||
| Abmessungen | Gewicht | Eingangs- spannung | Energieverbrauch | Betriebstemperatur | Schocktoleranz | Interner Speicher |
| 77 x 63 x 24 mm | 130 g | 5-10 V Gleichstrom | 4 W | -40 ºC bis +70 ºC | 15 g @ 11 ms Halbsinus-Impuls | 32 GB |
1 Typische Werte; die tatsächlichen Werte sind von den Bedingungen in der Ionosphäre und Troposphäre, den relativen Satellitenpositionen, der Länge der Basislinie und Mehrwegeffekten abhängig. Die angegebenen Genauigkeiten sind nur mit unverstelltem Blick zum Himmel und angemessener Differenzialkorrektur erreichbar.
2 Mit dualer Antenne und 1 m Antennenabstand. Eine höhere Genauigkeit ist mit größerem Antennenabstand erreichbar.
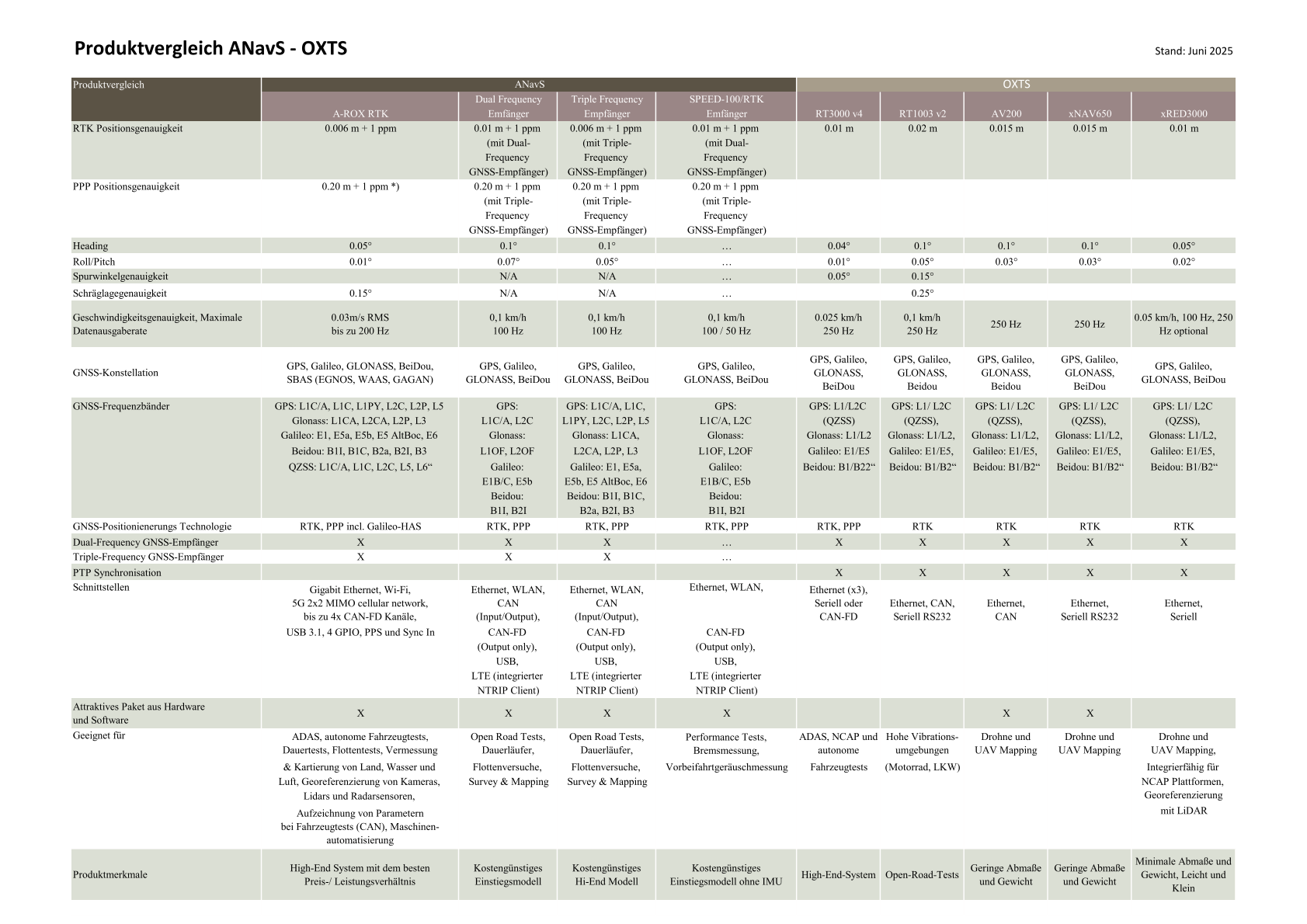
Produktvergleich ANavS - OXTS
{kind=link}
Ihr Ansprechpartner
