ANavS® RTK System
Geeignet für Open Road Tests, Dauerläufer, Flottenversuche und Survey & Mapping.
Mit präzisen Positions-, Geschwindigkeits-, und Lageinformationen
0.03° | 1 cm Positionsgenauigkeit |
0.15° | 120 Hz maximale Datenausgaberate |

ANavS Produkte
Das ANavS® RTK System liefert präzise Positions-, Geschwindigkeits- und Lageinformationen.
Es zeichnet sich durch ein sehr attraktives Preis-/ Leistungsverhältnis aus und ist ein sofort einsetzbares System (integriertes LTE-Modem mit NTRIP-Client). Aufgrund der Vielzahl an Schnittstellen kann es sehr leicht in die kundenspezifische Anwendung integriert werden, wie beispielsweise in OxTS-Anwendungen. Der ACOM Datenstrom ist zusätzlich kompatibel mit dem OxTS NCOM-Format.
Die Module haben bis zu 3 Multifrequency-, Multi-Konstellation GNSS-Empfänger (GPS, Galileo, Glonass, Beidou), eine MEMS IMU, einen Barometer, eine CAN-Schnittstelle für die Fusion mit Fahrzeugdaten wie Rad-Odometrie und Lenkwinkel, ein LTE-Modul für den Empfang von RTK/PPP-Korrekturen und die leistungsstarke ANavS® Sensor Fusion auf einer einzigen Platine.
Letzteres führt eine enge Verkopplung aller Sensordaten mit einem Extended Kalman Filter (EKF) durch. Die Grundplatine kann jeweils den Anforderungen angepasst und auch später entsprechend upgegradet werden.
Grundausstattung der ANavS RTK-Modelle
Alle Modelle haben in der Grundausstattung immer eine LAN und W-LAN Schnittstelle, ein LTE-Modul mit Steckplatz für eine SIM Karte für den Korrekturdatenempfang und möglichen Fernzugriff auf das Modul für Ferndiagnose und -bedienung. Die Daten können im Gerät abgespeichert oder online über LAN, W-LAN, LTE oder CAN ausgegeben werden.
Die Modelle sind jeweils erhältlich in einem robusten Kompaktgehäuse oder einem Metallgehäuse mit Touchscreen und Bedienterminal.
Anwendungsbereiche
- Open Road Tests, Dauerläufer und Flottenversuche
- Survey & Mapping von Land, Wasser und aus der Luft
- Georeferenzierung von Kameras, Lidaren oder Radarsensoren
- Loggen der Fahrparameter bei Fahrzeugtests (CAN)
- Anwendungen in der Luft- und Schifffahrt
- Maschinenautomatisierung
Eigenschaften
- Zentimetergenaue Positionierung mit hoher Robustheit durch die Tight Kopplung
- Integrierte Stützung mit Odometriesignalen
- Einfache Systemintegration in OxTS-Anwendungen und ACOM Datenstrom (kompatibel mit OxTS NCOM-Format)
- Bestes Preis-/Leistungsverhältnis
- Multi-GNSS
- Klein, leicht und geringer Stromverbrauch – auch über USB-C
- Zahlreiche Schnittstellen und integrierte WLAN und LTE Modems
- Aufgrund des Multi-Antennen-Setups sofort betriebsbereit, daher auch keine Aufwärm- und Einfahrprozeduren
Schnittstellen
- Ethernet
- WLAN
- CAN
- USB
- LTE (Integrierter NTRIP Client)
Vorteile
- Die patentierte tight gekoppelte Sensorfusion von ANavS® liefert 3D-Positions-, 3D-Lage-(Kurs, Nicken, Rollen), Geschwindigkeits- und Beschleunigungsinformationen in Echtzeit mit einer Aktualisierungsrate bis zu 120 Hz.
- Temporäre GNSS-Ausfälle (in engen Straßenschluchten, unter Brücken, in Garagen oder Tunneln) oder hohe Mehrwegeausbreitung (z. B. unter Bäumen) werden durch die Integration zusätzlicher Sensoren (IMU, Rad-Odometrie, Kamera, LiDAR oder UWB-basierte lokale Positionsbestimmungssysteme) überwunden, wodurch auch in schwierigen Umgebungen präzise Positions- und Lageinformationen geliefert werden.
- Einfache Systemintegration mit ACOM Datenstrom (NCOM kompatibel)
Unterschiede zwischen den ANavS-Modellen
Positionsgenauigkeit:
1 cm (RTK), 20 cm (PPP)
Zahl der GNSS Empfänger (RTK):
Single-, Dual- oder Triple-GNSS-Antennen System zur hochgenauen Attitude-Bestimmung (Yaw, Pitch, Roll).
Mit zwei GNSS-Empfängern/Antennen können zwei Winkel (z.B. Yaw und Pitch) hochgenau bereits im Stillstand bestimmt werden.
Mit drei GNSS-Empfängern/Antennen können drei Winkel (Yaw, Pitch und Roll) hochgenau bereits im Stillstand bestimmt werden.
Güte der IMU:
Low-, und Mid-Grade MEMS IMU
Umso höher die Güte der IMU, desto geringer ist der Positions- und Attitude-Drift bei GNSS-Signalabschattungen.
Gehäuse:
Industriegehäuse mit Touchscreen Bedienung
Kompaktgehäuse
UAV Anwendungen
Das ANavS Multi-Sensor-RTK-Positionierungssystem ist für die:
- Vermessung und Kartierung
- für die Überwachung und Sicherheit
- für die Inspektion der Infrastruktur
- oder für die Zustellung
aus der Luft bestens geeignet.
Empfehlung:
Für eine optimale Leistung empfehlen wir die Verwendung aller drei Multi-GNSS- und Multi-Frequenz-Empfänger, um hochpräzise Lageinformationen für Ihren Autopiloten zu erhalten.
Signalabschattungen (Brücken, Tunnel, etc.) sind bei UAV-Anwendungen nicht häufig der Fall. Aus diesem Grund empfehlen wir, nur die ANavS®-IMU-Option für Verbraucher zu verwenden.
Forschungs- und Entwicklungsprojekte von ANavS
1. Aktuelle Forschungs- und Entwicklungsprojekte mit ANavS als Konsortialführer
Projektziel für das Forschungsprojekt:
Um die fehlende Datengrundlage für die Validierung von Sensoren für das automatisierte Fahren zu erzeugen, soll ein hochpräzises Referenzsystem aus Radar, Kamera, Lidar, GPS und Inertialsensorik entwickelt, aufgebaut und in einen Versuchsträger integriert werden. Diese Referenzsensorik ist der heutigen Seriensensorik mehrere Jahre voraus und stellt die Grundlage zur Erfassung von genauen Sensordaten dar.
Projekt Periode: 07/2023 – 06/2026
Projekt Partner:
- ANavS GmbH
- Institut für Hochfrequenztechnik und Elektronik (IHE) am Karlsruher Institut für Technologie (KIT)
- Hochschule Offenburg (HSO)
- Freudenberg FST GmbH mit Sitz Weinheim
- Akkodis Germany GmbH, Sindelfingen
- FZI Forschungszentrum Informatik, Karlsruhe
- IAVF Antriebstechnik GmbH, Karlsruhe
- IPG Automotive GmbH, Karlsruhe
- GTÜ Gesellschaft für Technische Überwachung mbH, Stuttgart
- HighQSoft GmbH, Idstein
- RA Consulting GmbH, Bruchsal
- Dr. Ing. h.c. F. Porsche AG, Stuttgart
Projekt Leader bei ANavS: Dr. Patrick Henkel
Projekt Koordination: ANavS GmbH
Gefördert durch:
- Bundesministerium für Wirtschaft und Klimaschutz (BMWi)
- Europäische Union
Projektziel:
Entwickung neuer Lösungen für die Mobilität von Personen und Transportgütern, insbesondere für die genaue Lokalisierung von Mobilitätssystemen (Indoor und Outdoor), generalisierte Umgebungserkennung und risikobewusste Manöverplanung auf dedizierter Hardware zur energieeffizienten Lösung komplexer Teilprobleme auf Fahrzeugen, wobei der Schwerpunkt auf dem Werksverkehr liegt.
Projekt Periode: 07/2023 – 06/2026
Projekt Partner:
- ANavS GmbH
- FZI Forschungszentrum Informatik, Karlsruhe
- KIT, Karlsruher Institut für Technologie
- Schaeffler Technologies AG & Co KG
Projekt Leader bei ANavS: Dr. Patrick Henkel
Projekt Koordination: ANavS GmbH
Gefördert durch: Bundesministerium für Wirtschaft und Klimaschutz
Projektziel:
Entwicklung eines autonomen, heterogenen Schwarmes von Robotern zur Erkundung der Valles Mariners des Planeten Mars. Fahrende, gehende und fliegende Systeme sollen ihre Vorteile nutzen, um gemeinsam ein großes Gebiet mit unterschiedlichen Umwelteigenschaften zu erforschen.
Projekt Periode: 07/2022 – 06/2025
Projekt Partner:
- ANavS GmbH
- Julius-Maximilians-Universität Würzburg
- Deutsches Forschungszentrum für künstliche Intelligenz GmbH
Projekt Leader bei ANavS: Dr. Patrick Henkel
Projekt Koordination: ANavS GmbH
Gefördert durch:
- Bundesministerium für Wirtschaft und Klimaschutz
- Deutsches Zentrum für Luft- und Raumfahrt e.V.
2. Aktuelle Forschungs- und Entwicklungsprojekte mit ANavS als Projektpartner
Projektziel:
Die Untersuchung und Entwicklung innovativer GNSS-PPP-RTK-Positionierungsalgorithmen, die für eine hochgenaue Echtzeit-Positionierung mit GNSS-Korrekturen der State Space Representation (SSR) aus dem Galileo High Accuracy Service (HAS) und anderen Korrekturdatendiensten geeignet sind und mit anderen SSR-Korrekturdatendiensten wie z.B. der CNES IGS Echtzeit-Korrektur validiert werden sollen.
Projekt Periode: 01/2024 – 12/2024
Projekt Partner: ANavS GmbH
Projekt Leader bei ANavS: Philipp Bohlig
Gefördert durch: Europäische Weltraumorganistion ESA
Projektziel:
Entwicklung eines HW- und SW-Prototyps für "Fahrhilfen für Busse".
Die Anwendungen des Prototyps sollen darauf abzielen, den Fahrer beim sicheren Fahren zu unterstützen, indem ihm sicherheitsrelevante Informationen geliefert werden, die nicht nur auf der Fahrzeugposition und -dynamik, sondern auch auf der Umgebung basieren. Konkret geht es darum, hochpräzise und zuverlässige Informationen bereitzustellen, die den Fahrer z. B. vor dem Überfahren einer roten Ampel, vor Geschwindigkeitsüberschreitungen, dem Vermeiden von Zusammenstößen/Unfällen oder dem Fahren in der falschen Richtung warnen.
Projekt Periode: 12/2023 – 11/2025
Projekt Partner:
- ANavS GmbH
- EUSPA (European Union Agency for the Space Program)
Projekt Leader bei ANavS: Jorge Moran Garcia
Projekt Koordination: EUSPA (European Union Agency for the Space Program)
Gefördert durch: Europäische Kommission
Projektziel:
Stärkung der Wettbewerbsfähigkeit der PNT-Industrie.
Nach dem deutschen Gesetz zum automatisierten Fahren, ist für hochautomatisierte Fahrzeuge im öffentlichen Verkehr und in der Logistik ein technischer Überwachungsdienst erforderlich, um die Sicherheit zu gewährleisten. Im Rahmen des ESA-Projekts Nav 4 Future Mobility NAVISP arbeiten DiMOS und wir als Unterauftragnehmer gemeinsam mit der Ostbayerischen Technischen Hochschule Regensburg an der Entwicklung eines "Demonstrators für einen technischen Überwachungsdienst".
Projekt Periode: 09/2023 – 02/2025
Projekt Partner:
- ANavS GmbH
- DiMOS Operations GmbH
- Ostbayerische Technische Hochschule Regensburg
Projekt Leader bei ANavS: Andreas Sperl
Projektkoordination: DiMOS Operations GmbH
Gefördert durch: Europäische Weltraumorganistion ESA
Weitere Informationen zu dem Projekt ESA Nav 4 Future Mobility NAVISP Project
Projektziel:
Die Entwicklung eines mobilen Ortungssystem (mPOM) für Gleisbaumaschinen und Integration in die bestehende IT-Systemlandschaft der SBB.
Mit dem mobilen Ortungssystems, inklusive der Erkennung von Arbeitseinsätzen für Gleisbaumaschinen, soll die Arbeitsleistung automatisch erkannt, geortet und für die weitere Bearbeitung zur Verfügung gestellt werden.
Kunde: Schweizer Bundesbahn (SBB)
Projekt Periode: 10/2023 – 12/2024
Projekt Partner:
- ANavS GmbH
- sersa – Rhomberg Sersa Rail Group
Projekt Leader bei ANavS: Andreas Sperl
Projektkoordination: SBB Infrastruktur
Projektziel:
Während im Vorgängerprojekt ABSOLUT das Gesamtsystem einer hochautomatisierten, bedarfsgesteuerten ÖPNV-Landschaft entwickelt, aufgebaut und durch Versuche mit Probanden evaluiert wurde, zielt ABSOLUT II nun auf die Lösung eines zentralen Problems ab: Der bisherige Sicherheitsfahrer im Fahrzeug soll durch einen stationären technischen Betreuer in einer Leitstelle gemäß dem Gesetz zum autonomen Fahren ersetzt werden und so einen Fernzugriff auf das Fahrzeug ermöglichen.
Projekt Periode: 10/2023 – 09/2026
Projekt Partner:
- ANavS GmbH
- BitCtrl Systems GmbH, FSD
- FSD Zentrale Stelle, Dresden
- IKEM – Institut für Klimaschutz, Energie und Mobilität
- INIT GmbH
- Stadt Leipzig
- Technischen Universität Dresden
- glts cotech GmbH
- Leipziger Verkehrsbetriebe (LVB) GmbH
- Sedenius Engineering GmbH
Projekt Leader bei ANavS: Dr. Patrick Henkel
Projekt Koordination: Leipziger Verkehrsbetriebe (LVB) GmbH
Gefördert durch: Bundesministerium für Wirtschaft und Klimaschutz (BMWi)
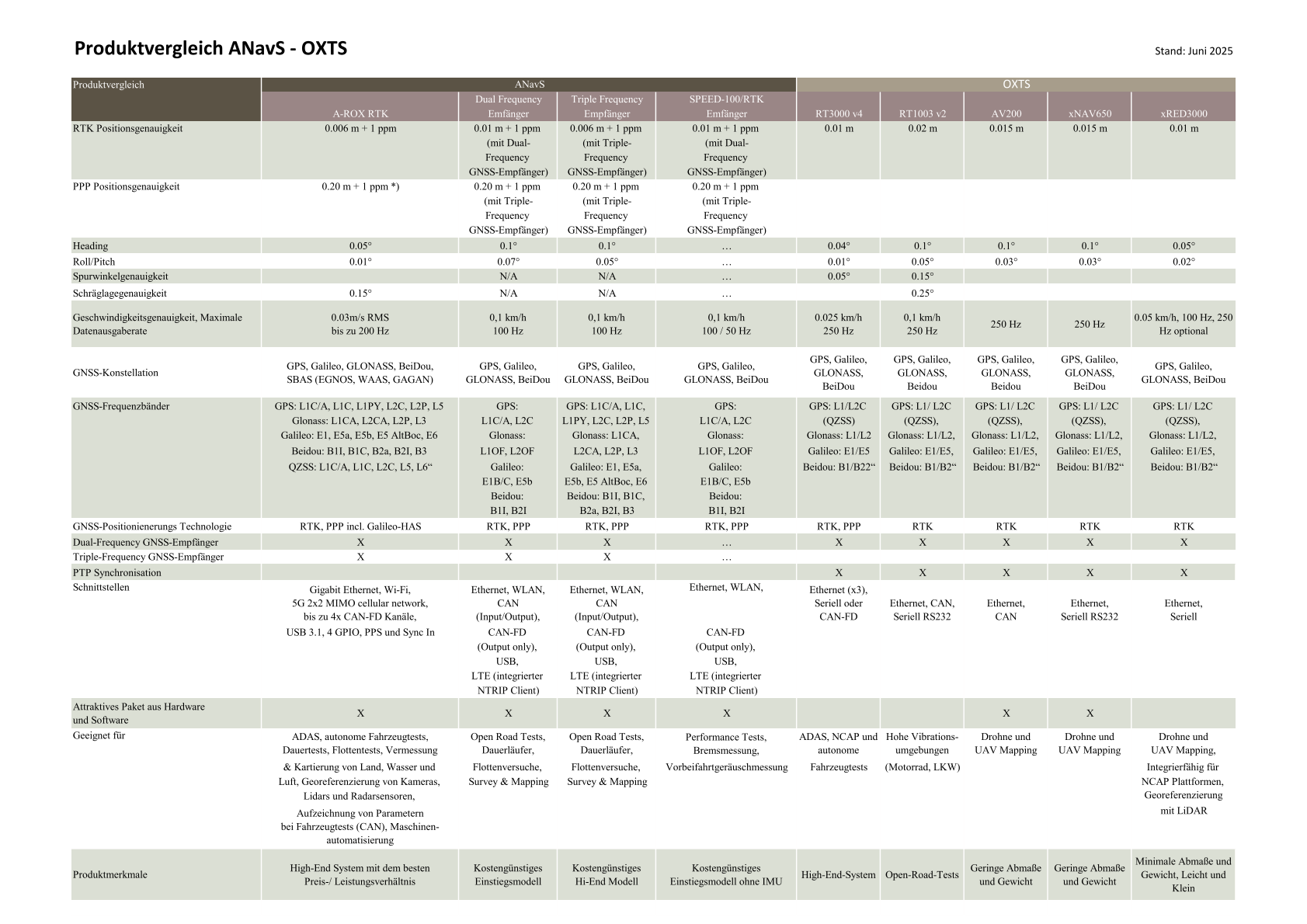
Produktvergleich ANavS - OXTS
{kind=link}
Datenblatt
Basisstation für alte und neue GPS/GNSS gestützte Trägheitsnavigationssysteme
Seit etwa 25 Jahren wurden Trägheitsnavigationssysteme mit GPS gestützt, um absolute Positionen genauer zu erfassen.
Die RTK- Lösung (Realtime Kinematik) wurde dabei mittels GPS Korrekturdaten von einer stationär platzierten Basisstationen realisiert, die dem Rover-System per serieller Datenübertragung übermittelte. Damit konnten die Positionen von einigen Metern auf wenige cm Genauigkeit verbessert werden. Aufgrund der Funkdatenübertragung war diese Lösung vorwiegend nur auf Testgeländen mit Sichtverbindung auf wenige km Umkreis beschränkt.
Technik heute
Inzwischen hat sich die Technik enorm verbessert. Einerseits verfügen die die neuen GNSS Empfänger über die Möglichkeit neben GPS noch GLONASS, Galileo und BeiDou zu empfangen, sodass die Satellitenanzahl von 5 bis 10 auf teilweise über 40 empfangbare Satelliten angestiegen ist, was alleine schon die Positionsgenauigkeiten auf 0,5m bis 1m verbessert. Dazu kommen die aktuellen Erweiterungen in den Korrekturdaten auf alle GNSS Systeme, die zu Positionsgenauigkeiten im 1cm-Bereich führen.
Herausforderung
Die Herausforderung besteht darin, dass ALLE Trägheitsnavigationssysteme, sowohl die Basisstationen als auch die Sensoren in den Fahrzeugen, GNSS Signale verarbeiten können. Leider sind alte Basisstationen und Sensoren nicht einfach zu erweitern, sondern benötigen - wenn überhaupt machbar - neue GNSS fähige Empfänger. Dazu müssen die zusätzlichen Satellitensystemen mit zusätzlichen Korrekturdaten erweitert werden, was zu Engpässen in der seriellen Datenübertragung oder auch zu Überlastung der Prozessoren führen kann.
Es hilft also oft nicht, nur die Basisstation aufzurüsten. Dann arbeiten die alten Sensoren nicht mehr oder umgekehrt hilft ein Aufrüsten der Sensoren nichts, weil die Basisstation dafür keine Korrekturdaten liefert.
Darüber hinaus sind inzwischen auch die Testumgebungen bezüglich Sichtverbindung und benötigter Reichweite zwischen Basisstation und den Fahrzeugen wesentlich anspruchsvoller geworden. Viele Erprobungen finden mittlerweile im öffentlichen Verkehr, oft auch international statt.
Fazit
Ein Aufrüsten der Geräte hat viele Facetten, die - vor allem bei einem bestehenden großen Gerätepark an Sensoren - in Betracht gezogen werden müssen, wie beispielsweise:
- Benötigen Sie eine permanent stationär installierte Basisstation oder eine mobile Basisstation?
- Haben Sie viele GPS-basierte Sensoren und/oder viele neue GNSS-basierte Sensoren?
- Möchten Sie alte GPS- und neue GNSS basierte Sensoren gleichzeitig mit Korrekturdaten versorgen?
- Nutzen Sie Testgelände mit GPS und/oder GNSS Korrekturdatendienst?
- Betreiben Sie die Fahrzeuge nur auf Testgeländen oder auch im näheren Umkreis?
- Betreiben Sie Fahrten weit weg von einer Basisstation?
- Benötigen Sie die RTK-Daten online oder erst im Postprozessing?
DTC hat für diese und für viele weitere Fragen die passenden Antworten für Sie und wir kennen sicherlich nicht nur eine Lösung für Ihre individuellen Anforderungen!
Sprechen Sie uns an und vereinbaren Sie einen Beratungstermin mit uns:
Themen:
- ANavS Referenzstation für alte RT-Bases
- Quad Konstellation
- LTE Internetzugeng
- Einmessen
- Service
- Feststation oder im Koffer mit Batterie
- mit SATEL parallel 2 Formate, 2 Frequenzen
- Speichern der Korrekturdaten
Ihr Ansprechpartner
